Flapjack Stator Thoughts
WARNING: THIS POST CONTAINS EXTREMELY SHADY ENGINEERING. HOLD NO ILLUSIONS ABOUT THE LEGITIMACY OF THE FIGURES AND METHODS. DO NOT TRY THIS AT HOME.
I’ve been thinking about alternatives in constructing the stator for Flapjack, my latest 3 lb R/C combat bot, besides milling it out of 5 oz copper-clad circuit board material. I think I can wind coils that would be epoxied into the cutouts on a stator retainer plate like this one:
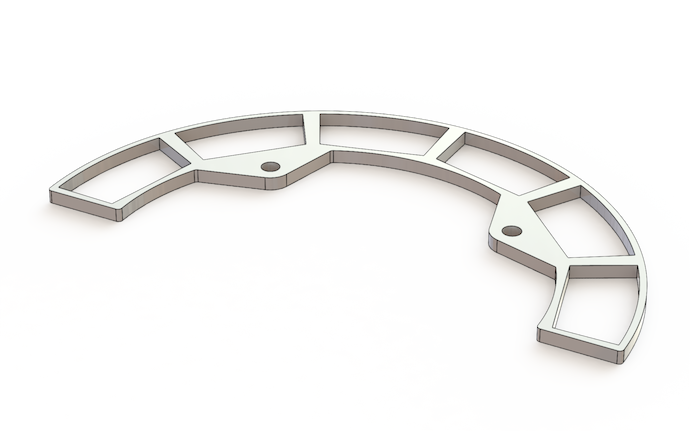
Physical fit §
The retainer is cut out of 1/8 in thick polycarbonate, and my windings would be four strands of 22 AWG magnet wire with double-thickness enamel. That would be 4 × 0.0276 in = 0.110 in tall within the cutout, save for the terminal of the coil which needs to come out somewhere, which makes this a 5 × 0.0276 in = 0.138 in overall height coil. If I file some away some indents in plastic between windings, then they stick just 13 mil out of the retainer. Overall, there’s a hair* shy of 1/16 in of clearance on either side of the stator with respect to the magnets on the stator.
I’m concerned that a vertical strike to the weapon can deform the mild steel rotor plates more than that and cause the magnets and magnet retainers to rub against the stator assembly.
Weight §
To save weight and to increase Kv, I would use seven turns in each coil, versus the eight on the P.S. WTFLOLs. This should have less effect on the motor than it initially appears, as each loop of the wire coils is significantly larger (on average) than the spiraling trace coils in the P.S. WTFLOL.
Generously speaking, each turn of this coil is, on average, 3.0 in of wire (the perimeter of the cutout is about 3.4 in while the innermost loop will be just 2.6 in in perimeter).
Now, I’ve got about 3.5 oz of weight to spend on the stator excluding fasteners, so with the polycarbonate retainers at 0.18 oz each, that leaves me with a quarter ounce of epoxy and tape to secure and insulate the coils with. That seems shady†; I might drop down to six turns or three strands in order to make weight.
Resistance §
Now for the whole point of moving to wire-wound coils: lower resistance.
By the way, I’m adding 2 in to each coil for termination, connection to the next phase, etc. The overall phase-to-phase resistance of 62 mΩ is a greater than 70% reduction in wye-terminated phase-to-phase resistance compared to the 0.226 Ω of the P.S. WTFLOLs.
Summary §
Using these coils would remove a big “ass” component of the permanent magnet coreless axial flux synchronous motor shell and printed spiral wound trace flux linking outer loops (PMCAFSMS, P.S. WTFLOL). Namely, I lose the P.S. WTFLOL part, but I am confident a suitable replacement acronym will come up. Moreover, a bigger proportion of the air gap between rotor sets will be filled with torque-producing copper and make for a much more powerful, efficient motor.
Efficiency becomes a big deal when you consider how much power needs to be dissipated from such a compact robot, and the fact that the energy onboard is limited: the ~50 kJ stored in the batteries means I can draw less than 23 W on copper heating is definitely something I worry about.
These windings I’m thinking of make for just 6% of motor loss at 10 A × 11.1 V = 111 W input power, but that’s not including eddy current losses nor the high ripple currents sloshing around the motor due to PWM. That’s still a huge improvement over the trace windings, where that loss is 20% at the same input power.
Eddy current losses would be much lower in comparison too, as each turn of copper is vertically oriented and separated into four conductors. However, unlike real litz wire, these conductor sets are not twisted together. So, the slight differences in flux density axially (see simulation results) mean that each strand produces a different EMF and that there will still some eddy currents between them.
To do §
- Build test jig for motor testing
- Print a new chassis which can hold the external big-ass ass-inductors for the motor
- Build winding tool for coils
- Wind, compact, pot, secure, and insulate coils into stator retainer plate
Wah.